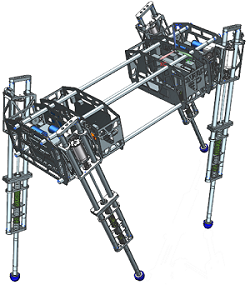
"CREATING AN AUTONOMOUS RUNNING ROBOT"

Vision
In nature, the vast majority of animals use legs, regardless of whether they hop across vast plains (kangaroo), run through dense jungles (tiger) or climb rocky mountains (chamois). Although we humans utilize these same dynamics, fully understanding and reproducing this phenomenon that nature has already optimized has till now eluded us. Robots using legs have the unique attribute of enabling relatively high speed and efficiency, while allowing movement across all sorts of terrain, as opposed to wheeled vehicles which, while being extremely fast and efficient, generally require a prepared track. In the past decade, several advances in legged robotics have been made, such as the BigDog, an extremely robust quadruped able to traverse very rough terrain, or the Cornell Ranger, which holds the record for the longest walking distance of 23 Km.