News
More than 8 month have passed since we started the project and we finally approach the final Roll Out. We would like to invite everybody to this great event where we will reveal Pegasus our four legged robot to the public for the first time! The exhibition will start with the presentation about the development process of our project and on how the robot functions. During the subsequent exposition we will display the robot in more detail and give a demonstration of the robot. It would be fantastic to see you at the Roll Out and show you our project!
Where: Entrance Hall of the ETH Main Building
When: The 31st of May at 4 pm

We are very proud to announce that Pegasus has been successfully assembled and is ready for action! Every one of us is excited to test all algorithms we have developed in the past months and is ready to put all effort, in order to bring life to this already impressive four legged robot. We are eager to present you a brand new runner for improved research in legged locomotion!
For the first time we were able to hop with one leg successfully! Now we are improving and stabilizing the hopping, in order to start the first tests with the four legged Pegasus, which we will start the first week of May.

The 3rd review has been successfully presented by Andreas and Matthias. Here we showed our supervisors from Zürich and Delft what our progress has been, since we arrived in Delft. We received a positive feedback and good suggestions in order to improve our project.
Some of the animations showed during the review are available on our Youtube channel.

We finally arrived at the Delft University of Technology, where we got welcomed by Daniel Karssen of the LegLab! Our temporary address will be:

TUDelft
t.a.v. Daniël Karssen
Mekelweg 2
2628 CD Delft
Also the manufactured parts arrived and our mechanics team is working hard to get a good assembly as fast as possible. The only missing parts are the batteries and the testing can begin!

We are very happy to welcome National Instruments as our new main sponsor for electronic components. The needed parts just arrived in time and were looking forward to use the high quality NI components to get Pegasus to run. We will also be able to present our cutting edge research at several events National Instruments is holding. Thank you very much for your trust and interest!
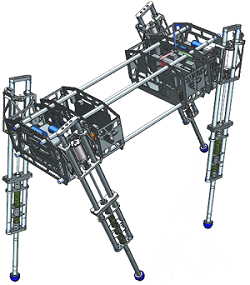
The assembly of the robot is now completely done in mechanical detail. For the body modules Keller Laser was found as a partner for manufacturing. The legs were slightly changed compared to the first prototype; the design was optimized to lightweight structure and a better guidance for the springs. These legs will be manufactured within the ETH facilities. We are looking forward to assemble the parts in Holland and testing what has been proved in theory!

On the 16th of December we had our 2nd Review, Koen and Steve presented on behalf of our team. This also gave us the opportunity to present our first leg prototype as well as giving a first impression of what Pegasus will be able to achieve in the next semester. We are glad that we got so much positive feedback from the experts that came to attend to our review.
We are proud to announce that we have successfully built our first leg prototype. This is a proof of concept of our leg design, since the mechanism is working as it should. Although the spindle drive is still missing, because of the long delivery time. This leg will be used in order to verify our simulations.
We also would like to thank our partners for their support to finalize this prototype and the people from the workshop for the inputs they gave us and for machining the parts for our prototype.
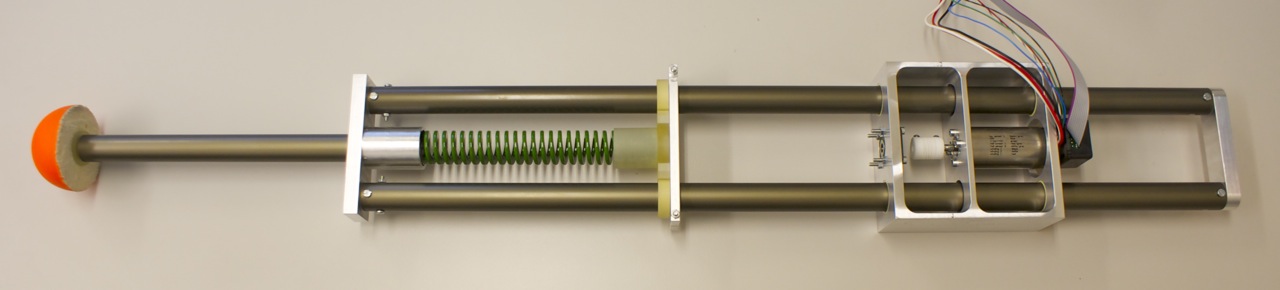
After two and a half months of the project, we already finalized the first prototype for a lightweight leg with changeable springs! Apart from the manufacturing work of the ETH, the motors and knowledge from maxon motor AG and support from Hilti will help us testing this first-of-its-kind telescopic leg in January and February.